A novel pneumatic stimulator for the investigation of noise-enhanced proprioception
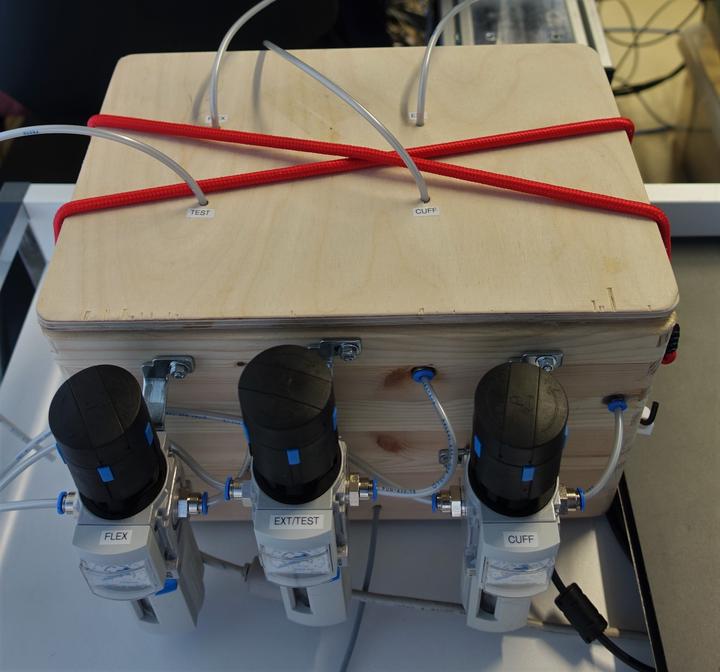
Using Soft Pneumatic Actuators (SPAs), we built a pneumatic actuator for tactile vibratory stimulation.
Abstract
Executing coordinated movements requires that motor and sensory systems cooperate to achieve a motor goal. Impairment of either system may lead to unstable and/or inaccurate movements. In rehabilitation training, however, most approaches have focused on the motor aspects of the control loop. We are examining mechanisms that may enhance the sensory system to improve motor control. More precisely, the effects of stochastic subliminal vibratory tactile stimulation on wrist proprioception. We developed a device - based on a novel soft pneumatic actuator skin technology - to stimulate multiple sites simultaneously and independently. This device applies vibratory stimulation (amplitude <; 0.50 mm, bandwidth 20-120 Hz) to the skin overlaying the tendons of a joint to target the receptors in charge of position and movement encoding. It achieves high spatial resolution (< 1 mm 2 ), uses a soft and flexible interface, and has the potential to be used in combination with additional rehabilitation interventions. We conducted a feasibility study with 16 healthy subjects (11 younger - 6 females; 5 older - 2 females) in which a robotic manipulandum moved the subject’s wrist to defined positions that had to be matched with a gauge. Comparing trials with and without stimulation we found that stochastic stimulation influenced joint position sense. The device we developed can be readily used in psycho-physical experiments, and subsequently benefit physiotherapy and rehabilitation treatments.